5.2 El sensor de distancia

DescripciĂłn
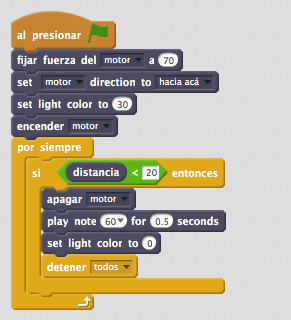
En este caso Milo avanzará hasta que se encuentre un obstáculo. Los detalles de este programa son:
- Se desplaza hacia delante de forma ininterrumpida a una velocidad dada.
- Se ilumina el led del smarthub en color verde mientras avanza hacia delante.
- Cuando detecta un obstáculo a una distancia inferior a 20 se apaga el motor, se reproduce un sonido, se emite luz de color rojo y se detiene el programa.
Montaje del robot
ProgramaciĂłn con Lego WeDo 2

ProgramaciĂłn con Scratch 2