5.3 El sensor de inclinaciĂ³n

DescripciĂ³n
En este caso Milo avanzarĂ¡ o retrocederĂ¡ en funciĂ³n de la posiciĂ³n del sensor de inclinaciĂ³n. Los detalles de este programa son:
- Se desplaza hacia delante de forma ininterrumpida a una velocidad dada.
- Cuando el sensor de inclinaciĂ³n se gira hacia delante, el vehĂculo se mueve hacia delante.
- Cuando el sensor de inclinaciĂ³n se gira hacia atrĂ¡s, el vehĂculo se mueve hacia atrĂ¡s.
Montaje del robot
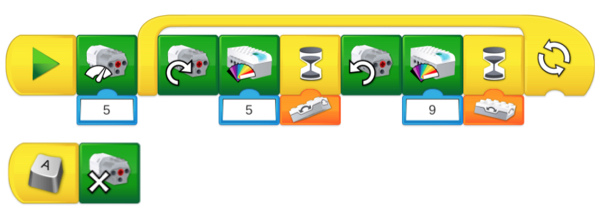
ProgramaciĂ³n con Lego WeDo 2
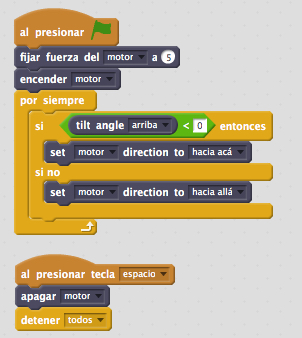
ProgramaciĂ³n con Scratch 2